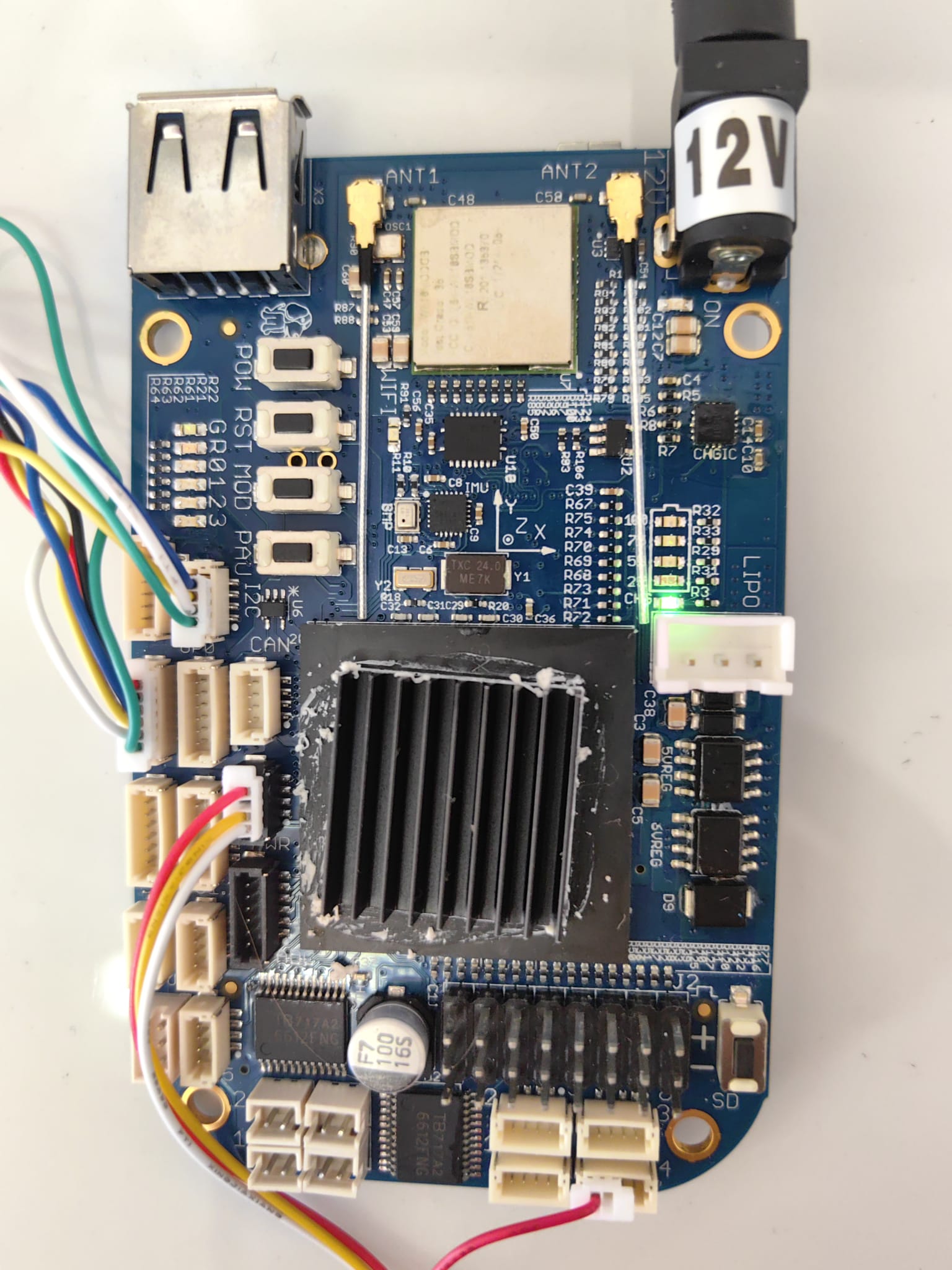
Sometime before I used beaglebone blue for arducopter and worked ok.
For arduplane I have following debug info:
Aug 24 08:32:23 beaglebone arduplane[1038]: MPU: temp reset IMU[0] 5431 -150
Aug 24 08:32:23 beaglebone arduplane[1038]: MPU: temp reset IMU[0] 8747 6932
Aug 24 08:32:23 beaglebone arduplane[1038]: MPU: temp reset IMU[0] 7600 -153
In the source code at ~/ardupilot/libraries/AP_InertialSensor/AP_InertialSensor_Invensense.cpp
there is a line that generate the above erroor:
debug(“temp reset IMU[%u] %d %d”, _accel_instance, _raw_temp, t2);
first impression was that the temperature is not correct read. Later in same file is function that check temperature:
bool AP_InertialSensor_Invensense::_check_raw_temp(int16_t t2)
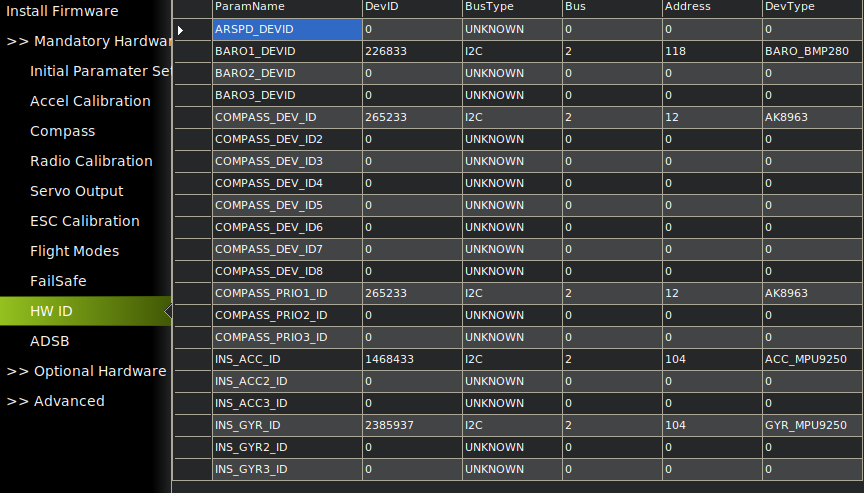
I bypassed this verification and the arduplane worked except inertial measurements. My conclusion was that all readings from MPU9250 are wrong (acceleration gyroscope and magnetometer ) not only temperature.
Because arducopter work ok , perhaps some functions allocations are inappropriate.
Please tell me if this forum is appropriate or I must go to the ardupilot.org.