sam_uk
1
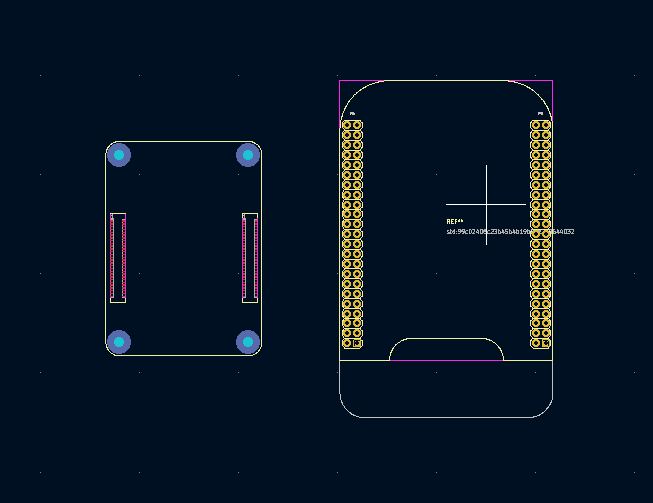
I’ve started work on a CM4 carrier in the beaglebone footprint
Any help with it would be great. I think it may only work if I can find 46pin SMD headers for it. Do those exist?
Help mapping the pins in the readme doc would be great too: CM4-Beagleboard/README.md at main · rosmo-robot/CM4-Beagleboard · GitHub
(Started a distinct thread so as to not clutter up the original thread this idea emerged from)
The more feedback you can get on the pinout, the better. I’m pretty sure I can get help with layout if the complexities of the pinout can be worked.
1 Like
sam_uk
3
I think the routing will be impossible unless space is freed up with SMD headers. I’ll look for those first.
I note te ULX4M FPGA testing seems to be going well, so that would be one completely open hardware module that could be dropped in.
sam_uk
4
Just a reminder to myself to look at the component choices made in CM4 daughterboard when I com back to this project
sam_uk
5
Just found some Brick nogging headers that might make this possible FH-00215 Liansheng | C2685099 - LCSC Electronics
sam_uk
6
Or alternately I could re-think the entire idea as a hat/cape
Steal the CM4 daughter boards from
And just make a BB cape instead of a RPI hat. You could use it to add additional compute to an AI-64 then.
If you used it with Raspberry Pi CM4 compatible i.MX 8M Plus SoM - Share Project - PCBWay You’d get an additional 2.3 TOPS per board too.
sam_uk
7