well actually I already asked that question in the discord. but I’m really making this post(?) to see if someone can help as well or to make it accessible for future reference (in case it can be solved hahaha).
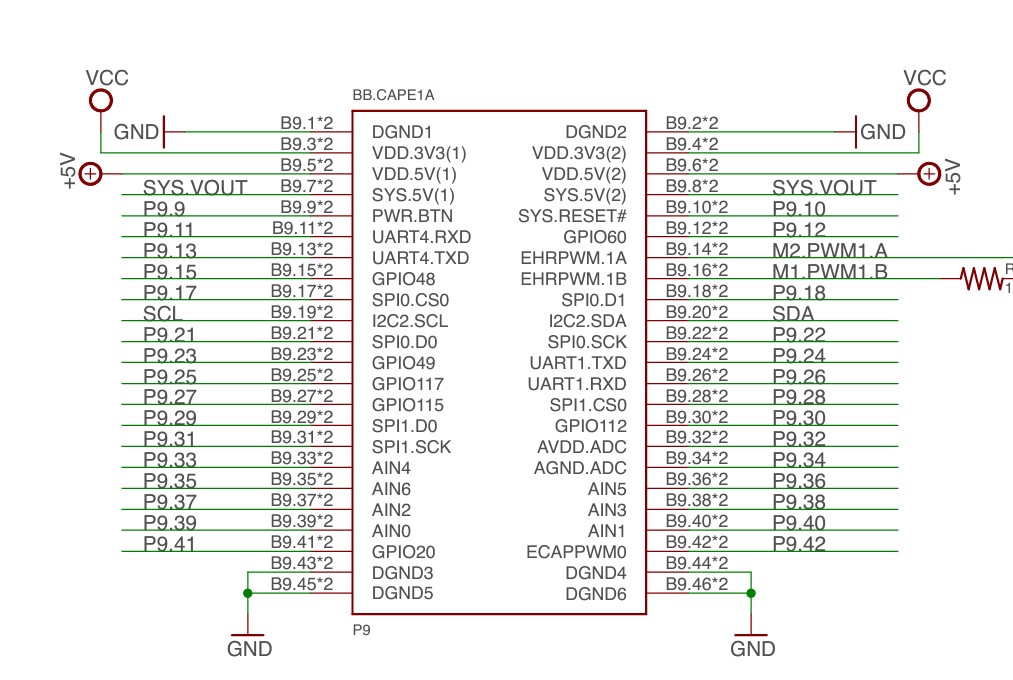
my progress is that when entering the diagram of the motor layer you can actually see which pins are used for gpio and pwm now we just need to see how to do the dtbo.
I looked and did not find an old overlay for the motor cape, I did that with load cape thanks to the help of @RobertCNelson pointing me in the correct direction.
No overlay would lead me to an assumption that the default base devicetree already has everything enabled. Might look over the schematic and see exactly what pins are used and go from there.
If you find it you can use a few git commands, I had to look those up, to move into the current branch. It might be better to build it in the official tree, this assumes it might require linking. If it has no linkages just use dtc at cli. It will take some tweaking since that is more than likely for BBB or it will be good starting point.
Seth here from the forums. Please forgive me. I am very sorry I routed you into thinking I could provide assistance. I remembered briefly of “thoughts” instead of hard evidence that it can work right now.
@foxsquirrel is right. Things are not in the correct manner to port it to the current spec.
Yes, much easier with bbb, it is very well documented and a very stable platform. Once you figure the BBB you just need to do a little magic to get ai-64 up. Unless you are doing some real heavy duty work the BBB is a very good choice.
That might be it, the pwm is something needed. I don’t have that cape, to verify anything.
It shows compatible with ai-64 so it might work. You will need it in .dtbo so you can add it in the config the ai-64 uses. I don’t recall the exact name, it is in boot somewhere.
The red flag is it uses am33 pin mux, is that correct???
They are in mode 7 which is an output with pull up, it looks like you have a strong basis for an overlay. Just get the correct node and registers for the AI-64. Without any includes you can use dtc, keep in mind if you have to add any #includes you will have to use the BeagleBoardDevicetree framework. Just drop the .dts in the src folder. $make, if it breaks or you are finished besure to $make clean
Those M2.PWM1.A are for the BBB like @foxsquirrel stated but the BBAI-64 may be able to have it in working conditions if the right people get to it. Me, I am out. I can provide shallow data for now…