Does anyone know the correct programming sequence for doing an I2C random read from within the PRU? I’ve tried this nicely written driver:
https://github.com/LinuxDroneLab/pru-i2c-lib
It works less than my code does…
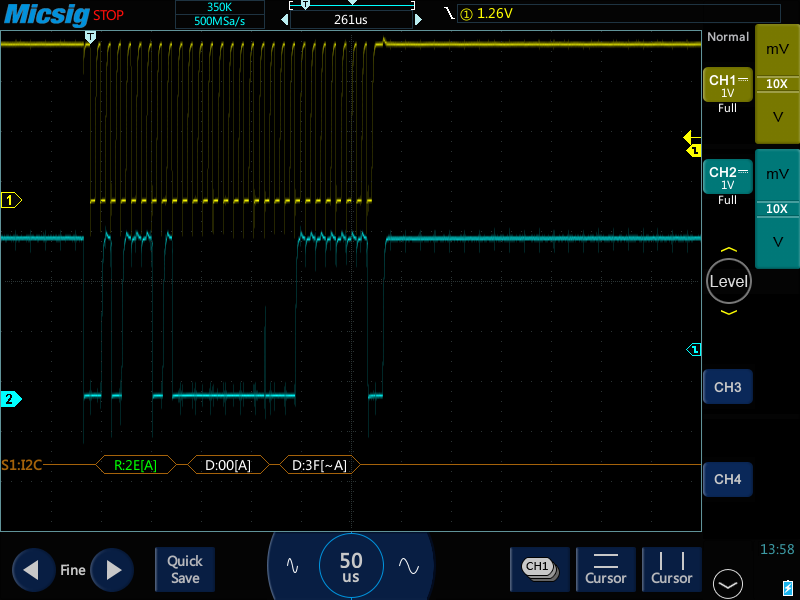
My code works fine if I call my routine once, on the scope I see the write followed by the read of the 2 bytes I want… Call my function again and all I see is the read.
Code and scope grabs attached - the documentation on the I2C module from within the AM335xTRM pdf is shocking and this problem is driving me mad…
/*
- read_wiper - returns the 2nd byte of a 2-byte read from the specified wiper
- ‘reg’ contains the write command to read the required wiper
*/
uint8_t read_wiper(uint8_t reg)
{
uint8_t dataByte;
//initialise i2c2 device
init_i2c();
//set I2C2_CNT register to 1 for initial write command
I2C2_CNT = 1;
while (!(I2C2_STATUSRAW & 0x0100));
//poll ‘buss free’ bit in I2C2_STATUSRAW register (bit 8) until it is non-zero
//set transmit mode
I2C2_CON = 0x8601;
//load data register with write command
I2C2_DATA = reg;
while (!(I2C2_STATUSRAW & 0x0004));
//poll ‘access ready’ bit in I2C2_STATUSRAW register (bit 4) until it is non-zero
//set byte count to 2
I2C2_CNT = 2;
//set receive mode
I2C2_CON = 0x8403;
while (!(I2C2_STATUSRAW & 0x0008));
//poll ‘receive ready bit’ in I2C2_STATUSRAW register (bit 3) until it is non-zero
dataByte = I2C2_DATA; //first byte is always 0x00
//zero the receive ready bit once we have read the 1st byte into our local variable
I2C2_STATUSRAW |= 0x0008;
while (!(I2C2_STATUSRAW & 0x0008));
//poll ‘receive ready bit’ in I2C2_STATUSRAW register (bit 3) until it is non-zero
dataByte = I2C2_DATA; //second byte is the value we want
//zero the receive ready bit once we have read the 2nd byte into our local variable
I2C2_STATUSRAW |= 0x0008;
while (!(I2C2_STATUSRAW & 0x0100));
//poll ‘buss free’ bit in I2C2_STATUSRAW register (bit 8) until it is non-zero
return dataByte;
}
void init_i2c()
{
/* Enable I2C2 clock signal generation */
while (!(CM_PER_I2C2 & 0x2))
CM_PER_I2C2 |= 0x2;
/*
- set I2C2_PSC register to 0x0B
- set I2C2_SCCL register to 0x0D
- set I2C2_SCCH register to 0x0F
- set I2C2_CON register to 1000 0110 0000 0000 (0x8600)
- set I2C2_SA register to 0x2E (address of MCP4641)
*/
I2C2_PSC = 0x000B;
I2C2_SCLL = 0x000D;
I2C2_SCLH = 0x000F;
I2C2_CON = 0x8600;
I2C2_SA = i2cPotAddress;
I2C2_BUF = 0x0000;
}