A few years ago I did a project that needed high speed CAN message acquisition from power up. The Raspberry PiZeroW took about 18 seconds to boot in its fastest incantation which meant 18 seconds of vehicle start up and running messages would be lost.
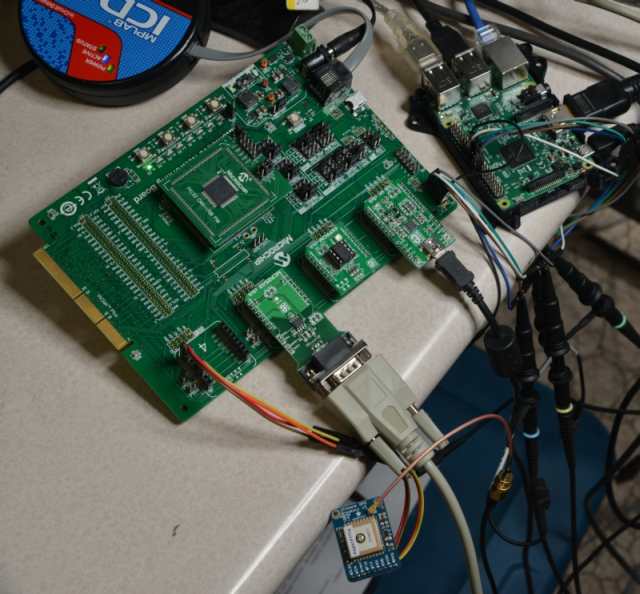
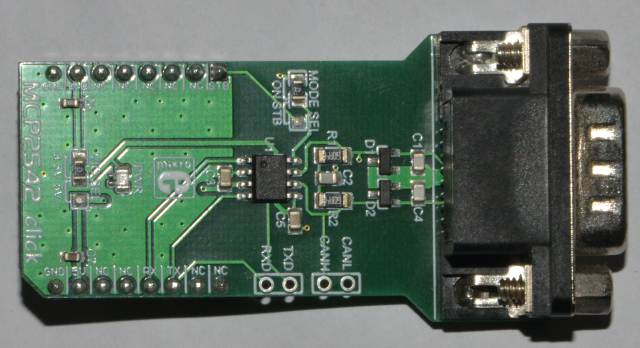
Eventually I used a PIC32 to do the power up data logging and dumped the data up to the PiZero acting as an SPI master while the PIC32 was the slave. Since I needed a number of features that weren’t on the PIC32 I used an Automotive Networking Board (ANB) which had a number of Click expansion sockets. One was the mcp2542 CAN bus driver terminating in a DB-9 with standard CANopen CAN bus format.
https://www.mikroe.com/mcp2542-click
Since I was buying Click boards I picked up a cape for the BBB.
https://www.mikroe.com/beaglebone-mikrobus-cape
That was a few years ago. Now I thought I’d use the cape and the mcp2542-click for testing CAN1 communications with the Beagle. But there’s a problem. Although the Click board worked properly on the ANB something wasn’t right with the Beagle installation. A bit of tracking with the scope and the schematics has shown there’s an error on the click board. Or on the cape. Although the board worked on the ANB jumpers directed the signals so I’m going to suggest the problem is with the Click board.
So: What is the problem? It derives from the ease of creating the TI processor silicon and putting the CAN1_TX signal on the same pin as the UART1_RX (GPIO14). That makes a carrier board like the cape difficult to deal with because it’s marked Tx on a pin that is Tx for UART but Rx for CAN. The trouble is the mcp2542-click board also thinks that the Tx for Uart is the same as the Tx for CAN1. It’s not.
The MCP2542-Click also has the two HDR1 pins marking CAN_H and CAN_L reversed. The signals are correct on the DB-9. Because the ANB motherboard (attached photo) has jumpers that can allocate what pins get what signal the best solution is to change the MCP2542-Click with some trace cuts and jumper wires.
I’ve passed on this information to www.mikroe.com but just be aware this Click board will not work on the BBB cape.
The Logic Supply CBB-Serial Cape does not have problems and I’ve been able to use the socketCAN utilities with it on the 2018 OS.
https://www.onlogic.com/cbb-serial/
It’s been discontinued along with the Logic Supply name as the above link shows.
In the long run this probably won’t matter because it seems like the Beagle itself is on its death bed.
John Dammeyer
 pound board on OpenRisc is my guess?
pound board on OpenRisc is my guess?