Could use some updates, but here is the most tested starting point I know about…
https://dscl.lcsr.jhu.edu/home/courses/me530707_2017_edumip_ros/
Could use some updates, but here is the most tested starting point I know about…
https://dscl.lcsr.jhu.edu/home/courses/me530707_2017_edumip_ros/
Hello Jason at al:
When I installed ROS on the BBB-Wireless in January 2017 I started with a recent Debian image. At that time the ROS binaries for Debian were not available, so I did a source-build of ROS.
For my ROS course students I compressed 32GB Debian Jesse image that has ROS kinetic and support for the Robotics Cape pre-installed – the compressed 32GB image is about 4GB. Get it here: it is the file “BBBW-debian8_6-ROSKineticFull_2017-02-16_32gb.img.zip”.
Building ROS from source on the BBB is not hard. You need to create and enable a swap file. The build takes about 26 hours. Instructions are here: I posted some additional notes here:
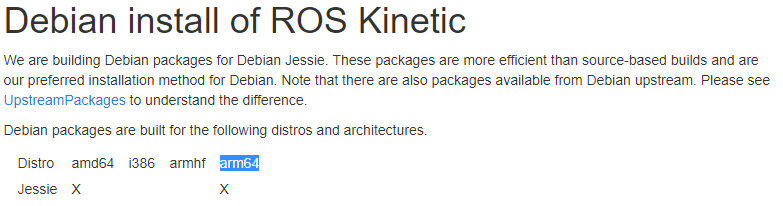
I see from here that ROS Kinetic binaries are claimed to be available for Debian/ARM64. I have not tested it, but will do so shortly as I will be giving a short course on ROS next month and will be once again using the EDUMip as a teaching robot in this short course. Best Regards, -Louis
I believe that Robert put some of the packages into his repository. It isn’t clear to me an easy way to discover which ones.
