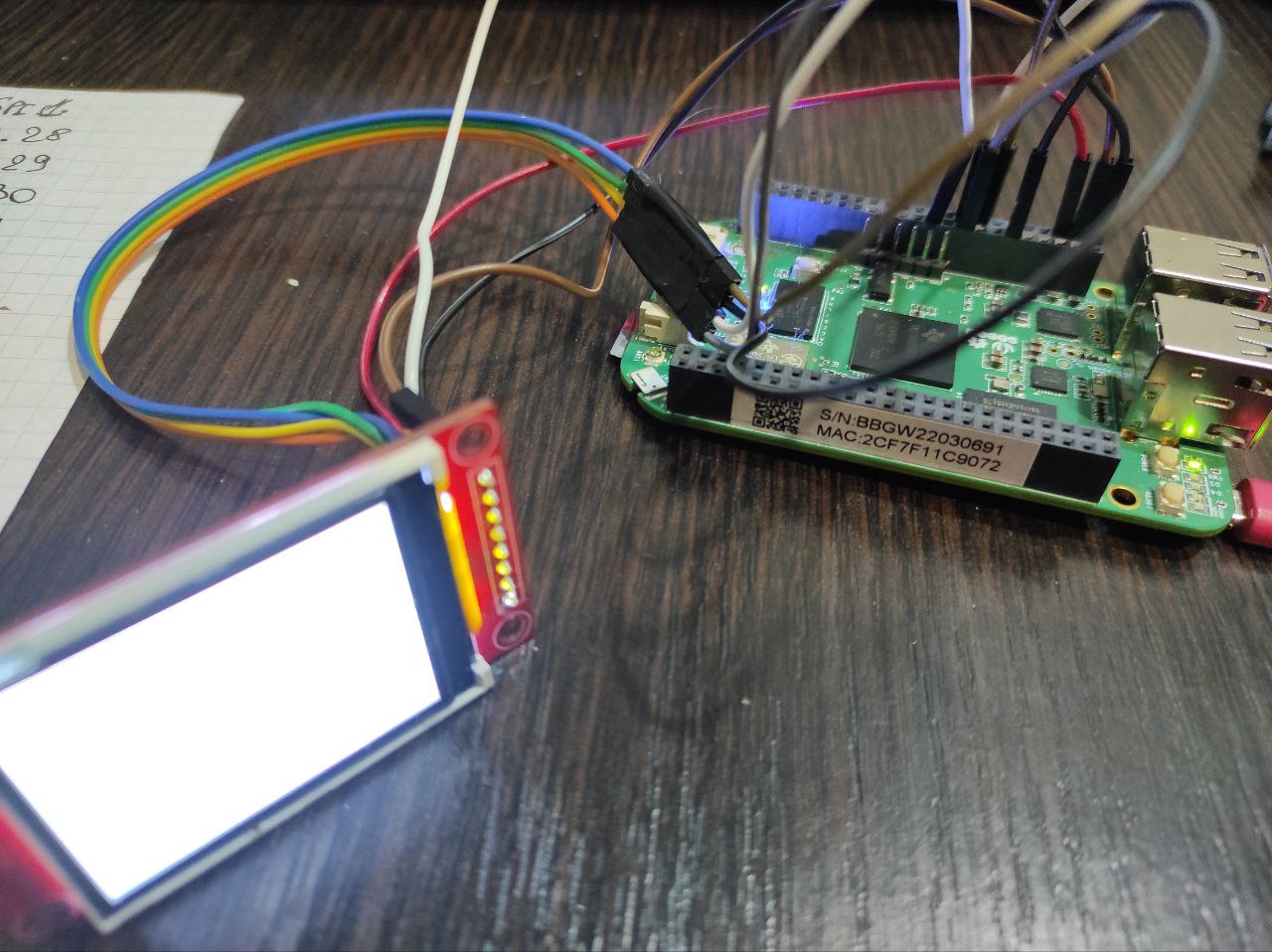
I removed the capacitors. But it doesn’t work for me. I don’t know what to try anymore?
lsmod | grep spidev
spidev 20480 0
# Copyright (c) 2014 Adafruit Industries
# Author: Tony DiCola
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
from PIL import Image
from PIL import ImageDraw
from PIL import ImageFont
import ST7735 as TFT
import Adafruit_GPIO as GPIO
import Adafruit_GPIO.SPI as SPI
WIDTH = 128
HEIGHT = 160
SPEED_HZ = 4000000
# Raspberry Pi configuration.
#DC = 24
#RST = 25
#SPI_PORT = 0
#SPI_DEVICE = 0
# BeagleBone Black configuration
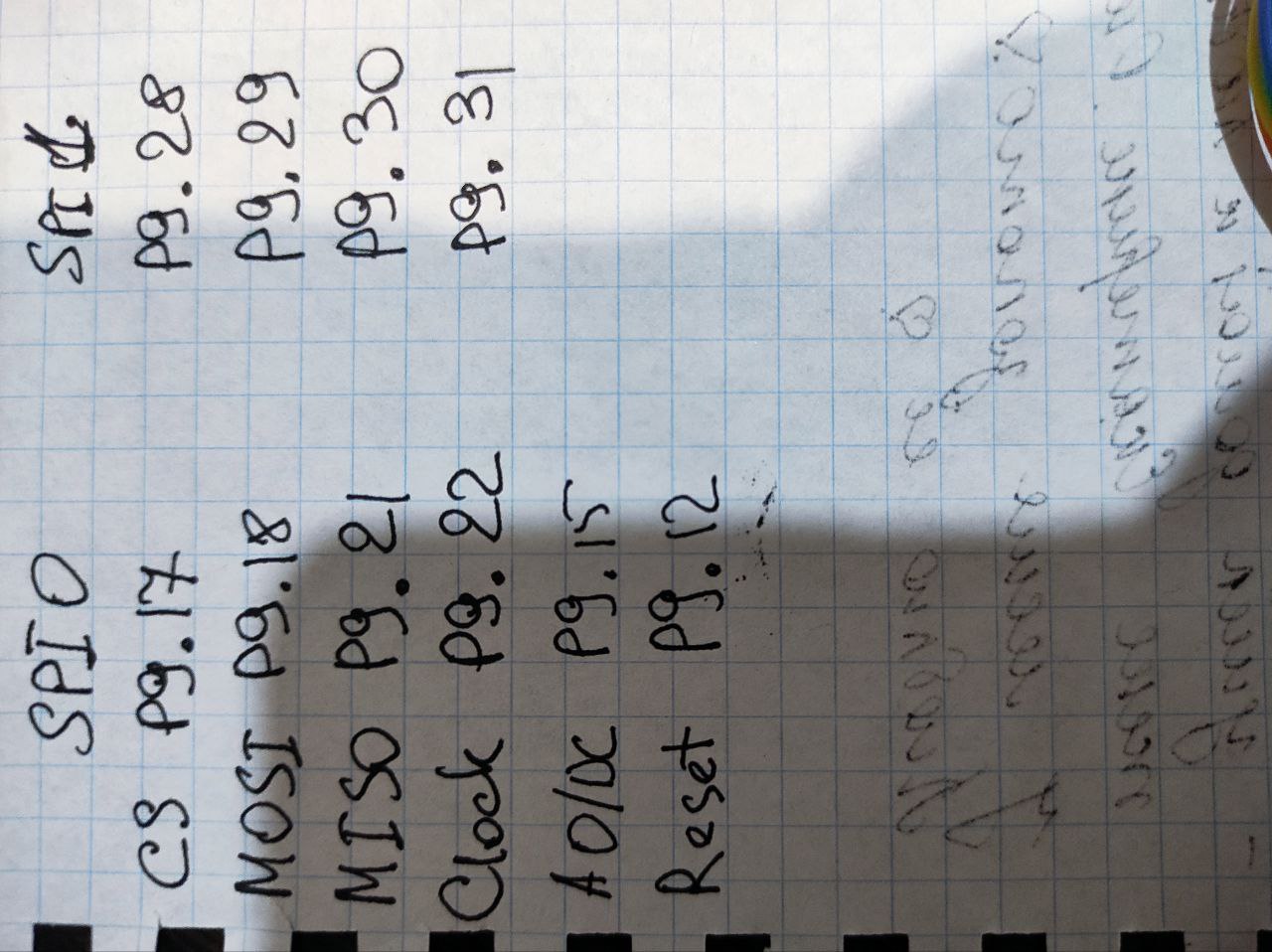
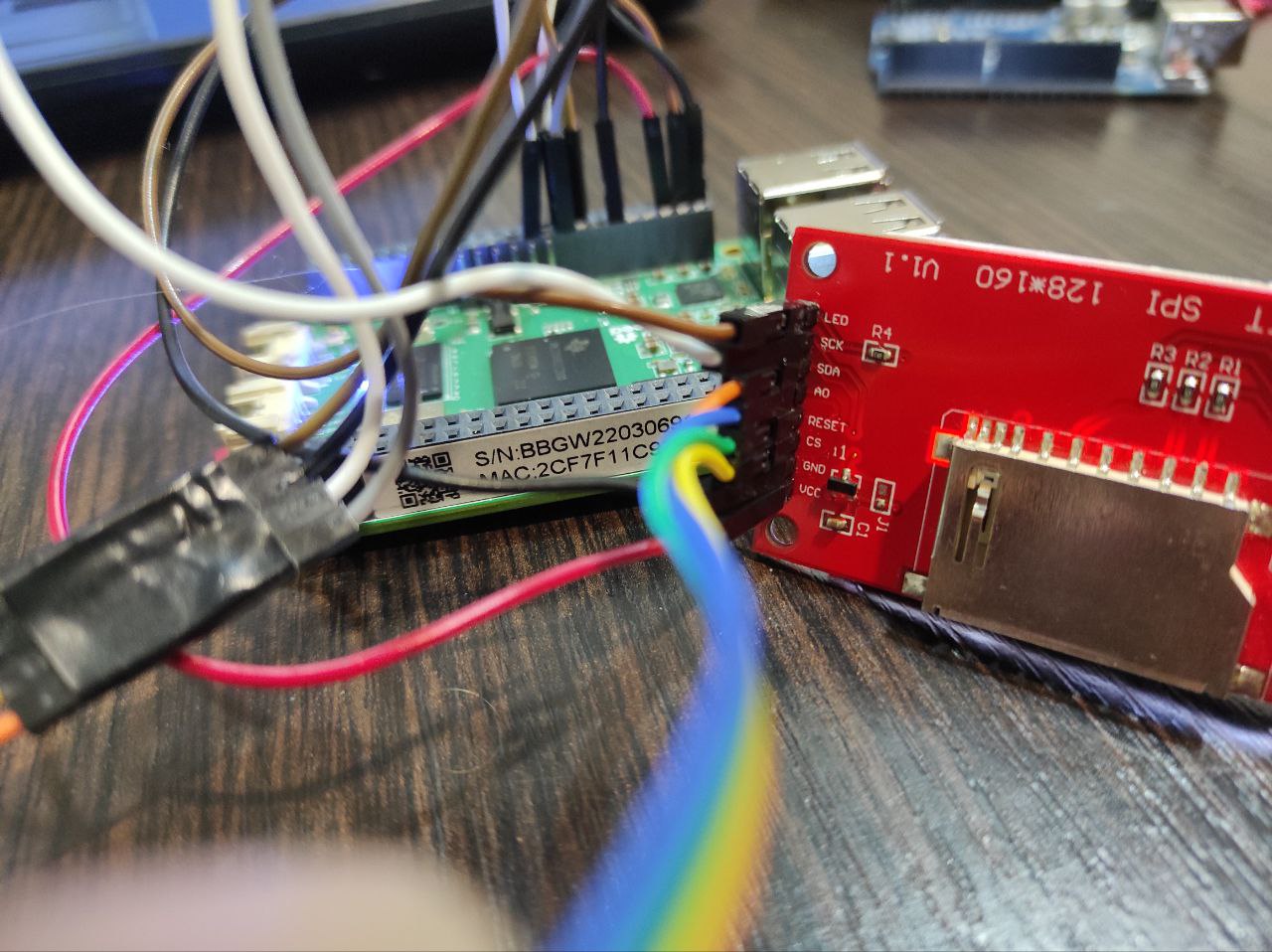
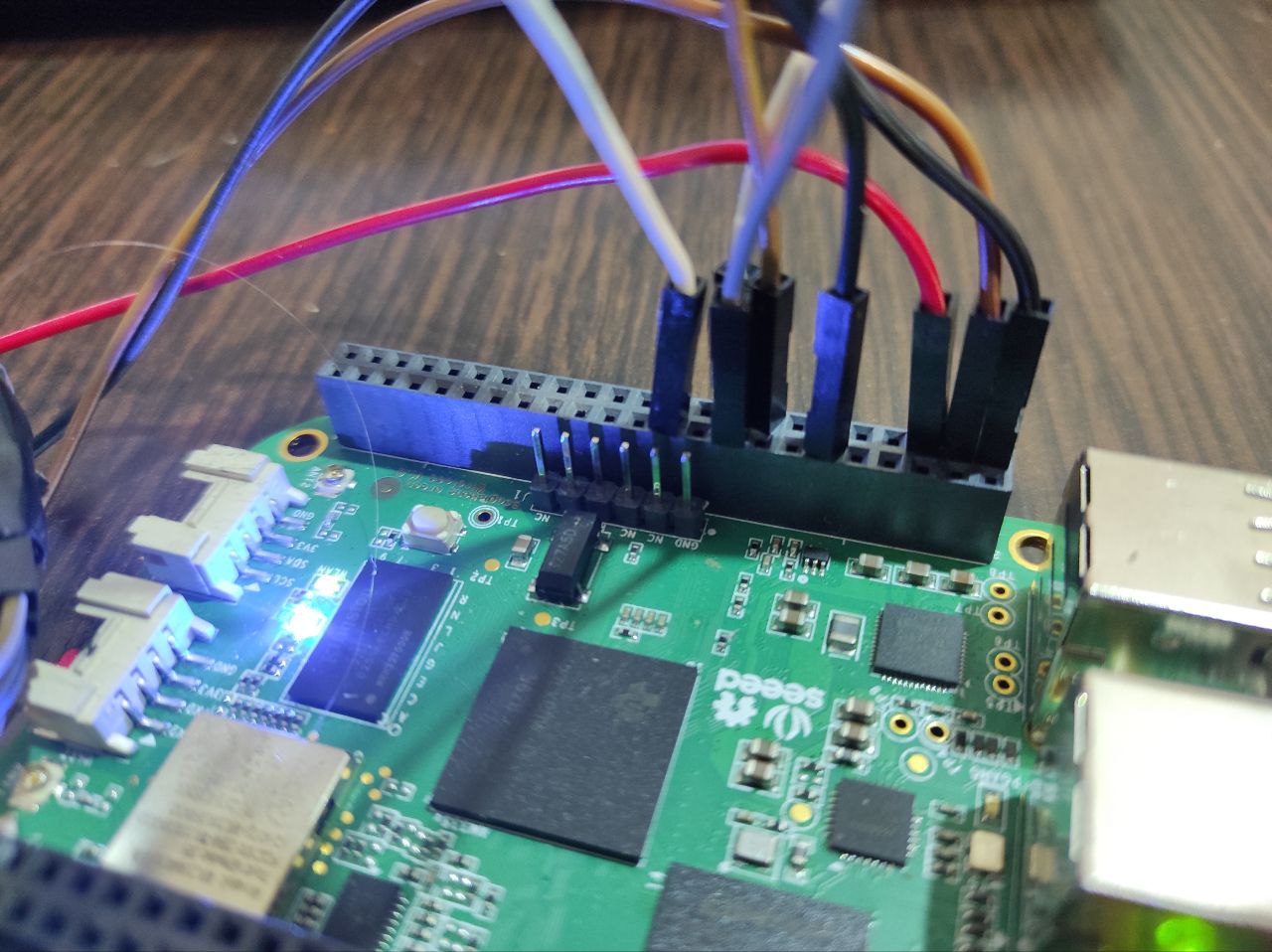
DC = 'P9_15'
RST = 'P9_12'
SPI_PORT = 1
SPI_DEVICE = 0
# Create TFT LCD display class.
disp = TFT.ST7735(
DC,
rst=RST,
spi=SPI.SpiDev(
SPI_PORT,
SPI_DEVICE,
max_speed_hz=SPEED_HZ))
# Initialize display.
disp.begin()
# Clear the display to a red background.
# Can pass any tuple of red, green, blue values (from 0 to 255 each).
disp.clear((255, 0, 0))
# Alternatively can clear to a black screen by calling:
# disp.clear()
# Get a PIL Draw object to start drawing on the display buffer.
draw = disp.draw()
# Draw some shapes.
# Draw a blue ellipse with a green outline.
draw.ellipse((10, 10, 110, 80), outline=(0,255,0), fill=(0,0,255))
# Draw a purple rectangle with yellow outline.
draw.rectangle((10, 90, 110, 160), outline=(255,255,0), fill=(255,0,255))
# Draw a white X.
draw.line((10, 170, 110, 230), fill=(255,255,255))
draw.line((10, 230, 110, 170), fill=(255,255,255))
# Draw a cyan triangle with a black outline.
draw.polygon([(10, 275), (110, 240), (110, 310)], outline=(0,0,0), fill=(0,255,255))
# Load default font.
font = ImageFont.load_default()
# Alternatively load a TTF font.
# Some other nice fonts to try: http://www.dafont.com/bitmap.php
#font = ImageFont.truetype('Minecraftia.ttf', 16)
# Define a function to create rotated text. Unfortunately PIL doesn't have good
# native support for rotated fonts, but this function can be used to make a
# text image and rotate it so it's easy to paste in the buffer.
def draw_rotated_text(image, text, position, angle, font, fill=(255,255,255)):
# Get rendered font width and height.
draw = ImageDraw.Draw(image)
width, height = draw.textsize(text, font=font)
# Create a new image with transparent background to store the text.
textimage = Image.new('RGBA', (width, height), (0,0,0,0))
# Render the text.
textdraw = ImageDraw.Draw(textimage)
textdraw.text((0,0), text, font=font, fill=fill)
# Rotate the text image.
rotated = textimage.rotate(angle, expand=1)
# Paste the text into the image, using it as a mask for transparency.
image.paste(rotated, position, rotated)
# Write two lines of white text on the buffer, rotated 90 degrees counter clockwise.
draw_rotated_text(disp.buffer, 'Hello World!', (150, 120), 90, font, fill=(255,255,255))
draw_rotated_text(disp.buffer, 'This is a line of text.', (170, 90), 90, font, fill=(255,255,255))
# Write buffer to display hardware, must be called to make things visible on the
# display!
disp.display()