Also…
updates on BBAI-64 from me to you!
1. Do not try to update the BBAI-64 w/out an Ethernet cable
a. This will cause a network timeout
b. Your other terminals may be compromised, i.e ending early or w/ error.
2. If you are using a WIFI m2, okay.
a. I know nothing about this case.
b. If they work, awesome.
3. Look at the image and kernel I am using before trying to make it right or wrong!
a. cat /etc/dogtag: BeagleBoard.org Debian Bullseye Minimal Image 2023-01-13
b. uname -r: 5.10.153-ti-arm64-r86
Enjoy!
Seth
P.S. If anyone likes the build of the STM or another type of M0 or M4 for adding commands from the host BBB to target M(n), look above at the first post. I think the actual chip on that Cape was a ST but TI makes M0 and M4 chips too… They may be easily interchangeable and useful for interrupts, motor movement, and/or other off loading to the smaller, less powerful chips…
update of ideas for the quad in question
I will allow some negative comments on this one since I was not ready for what entailed:
My 3D prints w/ the Recore board and the Klipper source gave way to ideas of grander. This false since of easiness warped my mind and the 3D Prints.
Anyway, if you have any collective consensus on what I should do next outside of losing the rope and ties, please advise me. I am always looking to advance in mechanical and source ideas.
I got that 3D Print from this fellow online: https://www.instructables.com/3D-Printed-Robot-Dog/
Although, the prints were well thought out, my printer capabilities w/ these prints were not well thought out. There were some warping and other ideas that created instances of negativity towards the entire build process.
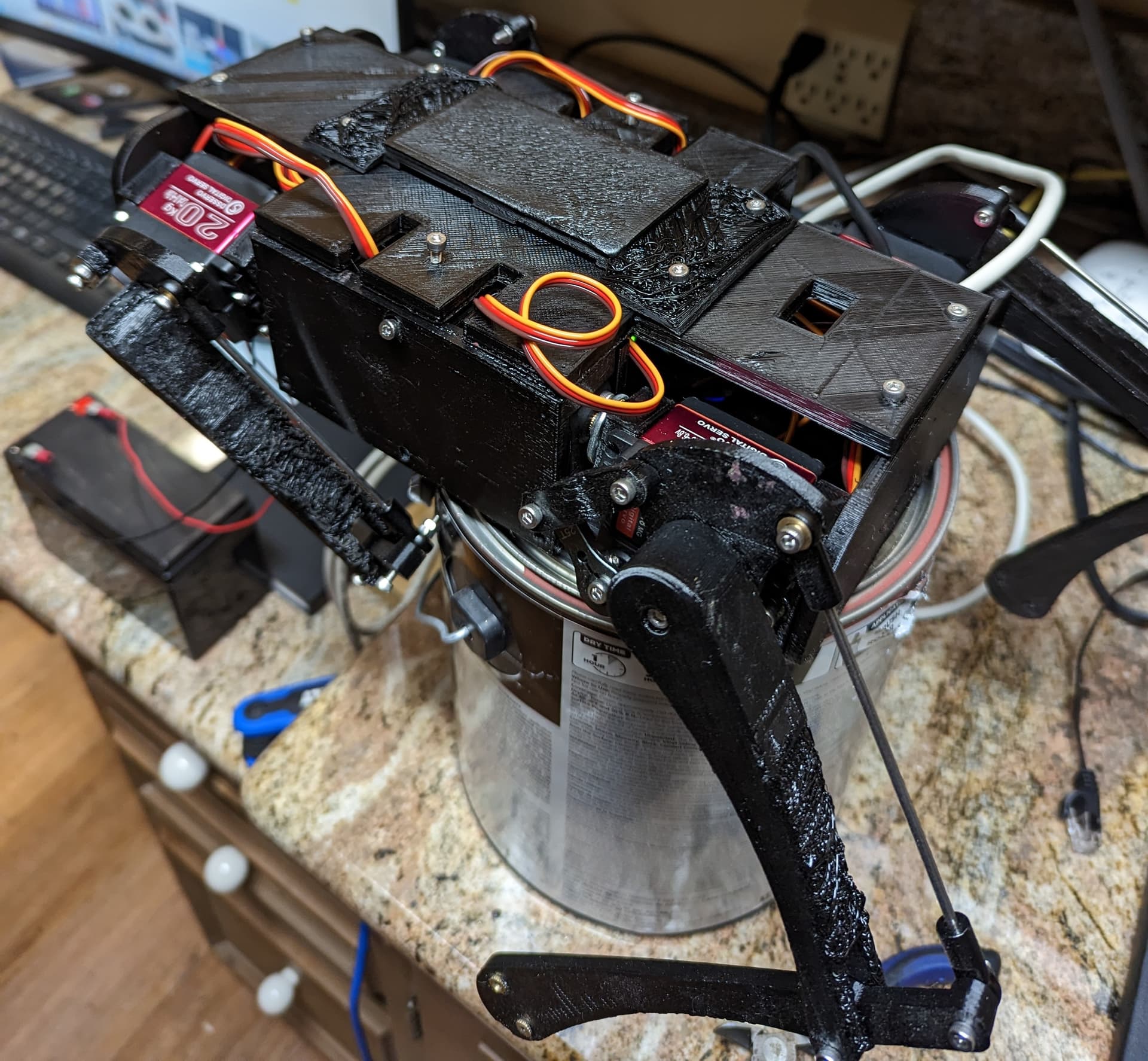
And yes, that is the BBB w/ Relay Cape controlling all those darn servos! Here is a completed version of the bot w/ the BeagleBone Black and ServoCape:
It is all connected and the Bone is inside of the machine…it moves, not quite perfect yet, to the beat.
Anyway, I hope you guys are having fun and building things. Keep up the good work! A smaller battery will be needed to mount…any ideas?
Does anyone have any ideas for smaller batteries that can be used?