I posted the remote control for this in Software, but I put a bunch of hardware in it so I thought I’d post it here.
https://groups.google.com/forum/#!category-topic/beagleboard/software/evSIUcuWfUY
I posted the remote control for this in Software, but I put a bunch of hardware in it so I thought I’d post it here.
https://groups.google.com/forum/#!category-topic/beagleboard/software/evSIUcuWfUY
Still trying to find my blueprints for it (I think its on my Ubuntu box, but my monitor is fried on it, grrr, and I’m sure its not accessable on FTP, I’m on my Windows 10 workstation now), but here is an interesting example of MOSFET motor speed control via GPIO or PWM.
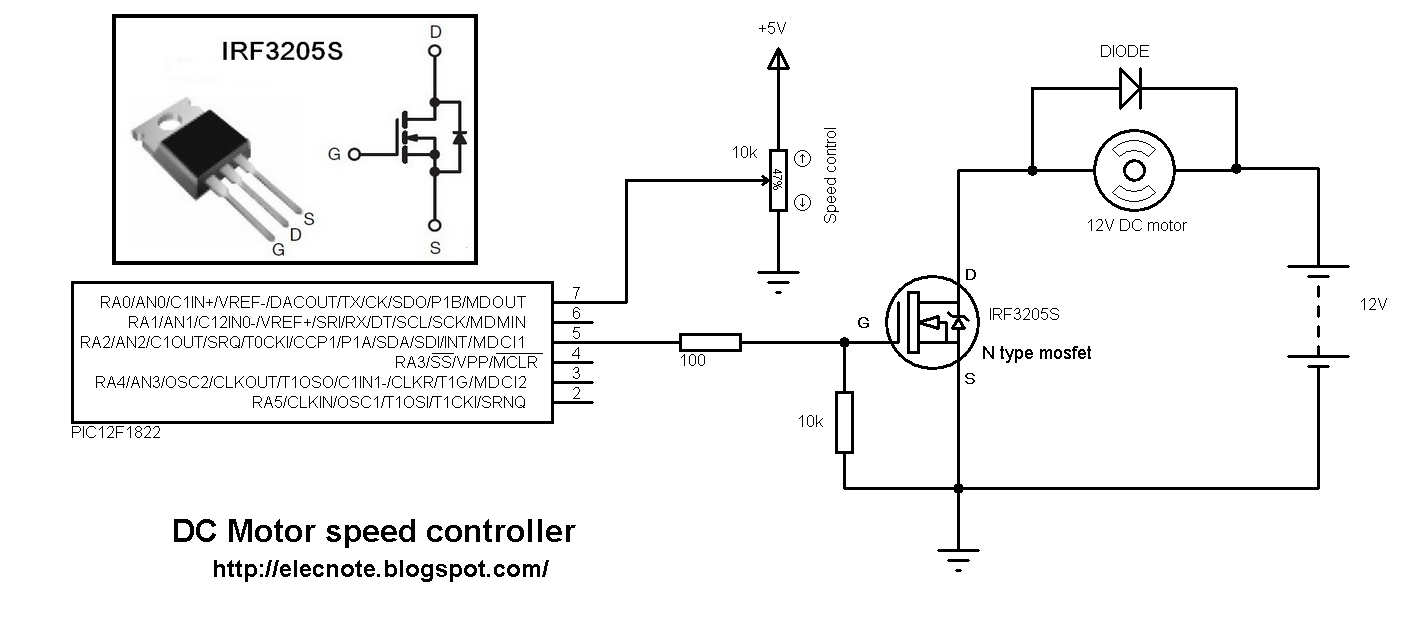
The top center part of it is kind of dumb in that I think their point is to use a pot read by an ADC to do the speed control. However I would do it via UART or software instead. However the rest of the circuit is a great example of real motor speed control using an inexpensive MOSFET driven by MCU or BBB PWM.
OK, just got my BBBW wireless acquiring well over about 200 feet (indoors) and about 400 feet (outdoors) so I have enough of a wireless tether to actually fly my drone. Very impressed with this little unit (the BBBW); I was a little concerned over the little antenna but they seem to work nice.
Next step is to integrate my MCU6050 inertial unit to it via P8/9 I2C (only interface on it). Its a 6DOF that I got from Hong Kong for about $5 free shipping, its on a break out board and even has an “attitude engine” on it. Why this is important is that back in the day, iMEMs stuff like piezo gyros and accelerometers were only 1DOF voltage-out, but this one not only has the ADC’s onboard, they are controlled with their own MCU that calculates to x,y,z,vx,vy,vz,ax,ay,az,tx,ty,tz and I think even rate) and allows the host (in this case the directly connected BBBW) to just receive the actual data we need.
If you want to experiment with the MCU6050 it is 3.3v so compatible with the BBBW right out of the box, uses I2C and only $5 total on ebay (just search on the part number) comes mounted on breakout board with 0.1 header (like SIP) that you just solder on. I’ll post up here as I have successes with interfacing it. I can also provide download locations for my tablet-based drone remote (windows installer) as well as code example on the NEO6M, PIC and MCU integration.
I wanted to go nuts with external MCU’s but now I’m thinking that I’ll have a 3.3V domain and a 5V (TTL) domain on my power section so I’ll get my PIC (5V) doing the PWM for the motor speed control. It will have 8 motors counterrotating per pod (I think I might have a sweet way of controlling yaw through coordinated power throttling). So I’ll be able to finally use my bootleg K150.
I’m thinking maybe voltage divider (resistive…I’ll put up some sweet discrete networks here so we have some reference designs to bridge cheaply and small-ly between the two voltage domains and others) to translate signals from TTL (5V) down to 3.3v (we did this with RS232 with the PIC for years and years now), and an led-heatshrinktube-phototransistor from 3.3v up to TTL (5V) forming a tiny single line/single direction optoisolator.
Actually scratch that, here is a $0.18 jobbie that does exactly the same thing. Looks like optocoupler will do it if I can keep the discretes count low.
OK, let me explain what I’m doing here. A lot of you realize that what I’m building here is more of a tiny UAV than a toy drone, but I want to have enough processing power on-board that I can do whatever I want.
How its different is my design philosophy in that what I’m trying to do here is shift the majority of my work to a software domain from a hardware/power one. I’m just going to breadboard and build the drone, but all of my flight control will be done with TCP/IP stack with the processor running a service daemon that provides the guidance I’m looking for.
It will be based on a force-moment-mass model based on empirical tests (and weighting the darn thing) that will formally implement a drone control that is smooth, scientific and possibly autonomous that is 100% done in software (based on SENSOR and ACTUATOR section in the physical design). In other words, it will be sweet once finished, capable of long-range semi-assisted flight. I’m thinking of integrating 4/5G data (via USB model model) but only pushing across limited numeric data (caching its video) to keep my usage within plan, but I hope to be able to send a command that will return (via FTP over 4/5G) a nice compressed JPEG still whenever I want to see a location.
I’ll just pull the saved video off via manual FTP via wifi once it comes back into range, or just popping the SDCard on the cam itself (which might made more sense, though less techy).
Getting close to that time I need to start ordering stuff from mouser but I need to get a complete BOM together for the physical stuff.
I’ll keep you guys in the loop on this one (as a lot of the issues I’m solving are directly related to your projects like voltage conversion) but I want to warn people that the final result may not be open-source as I might choose to release it as a boilerplate commercial version. However I can still make notes here to help in your own projects, and you can shadow my development and processes to develop your own (possibly open source).
Woody:
If you are translating between 3.3 and 5 Volts I2C domains,
I recommend you use the PCA9306, Available from TI or NXP.
Adafruit has breakout boards, if you want to experiment.
— Graham
This is pretty great. Will you add to hackster.io and/or Hackaday.io?
OK, set up an account there. I’ll copy this over later. Good to see you Graham and Jason again 
Ok want to brag. And just remember envy is ugly.
I was expecting to pay $14 for some angel motors out of hong kong, but I found some nice $5 ones with the same specs. Read them and weep:
They are even gold colored. Hopefully they work well, but all of the stuff I’ve gotten so far out of Hong Kong is nice. Even comes in the nice little anti-stat bags. But I have a confession to make, that I’m liking this whole spree I’m on…I have some lead/tin solder coming in. I’ve looked at the natural consequences and realizing that my prototyping (no matter how prolific) wouldn’t affect the lead content of things one iota, so I’ll save myself the aggravation of silver (oh god, the aggravation of working with that metal, anyways).
I even have an absolutely barbaric 30W iron from Chicago Electric (I think it even sings opera)…a real board-destroyer in any but expert hands. I need to feed it right.
To continue the brag, I had a small sum set aside to do some 3D printing…however I have seen the real quotation numbers on it. Noy much like the next inkjet like how they say.
So I was out a connection system for rod, but got a little intuition and got a big bag (a literal big bag) of 1/2" dowel end caps. But what makes them special is this little protrusion with a 1/8" hole through them that is the key to success here I think. I’ve looked at it geometrically and I think I have a winner.
I’m thinking of doing a trick I used to do back in the day where I mix up some chips of ABS plastic (of of an old pipe or something) and mix in acetone and mix until its a nice thick paste. Then I solvent weld the hell out of whatever plastic I’m using (crossing my fingers these little jobbies I have secured for my own use are of a compatible plastic) but I am SURE that it will lead to the intended effect and a practical drone prototype.
But I have been looking at the forces and loads and realize that I might have to put a kind of mast right in the center of the base board that doesn’t have me pleased (though it does it make it some what look like a ship, I understand there are some people into that). However I wouldn’t say its typically my aesthetic.
If it works half as perfectly as I’m anticipating I will post more of this technique here because it seems the WAY to realistically produce prototyping geodesics because of the flexible approach. We will see.
Let us look at these motors again. A lot of you are doing (well, thinking of) drone projects so let’s talk a little about my little Beagle and thick-conductored “hot” motors, How we get them making sweet electric love with each other.
Ok what you do is you feed off of one of your PWM or GPIO lines of your favorite beagle. Both have their downsides. Hardware PWM is lacking a certain jeun-se-quoi, its just a little too digital (those that have worked with it before know what I’m talking about). However software-based PWM (how motor speed control is done) via GPIO I would surprised is good on a multitasking OS environment like UN*X. Maybe with interrupts…idk.
Of course my solution is elegant. I went out and saw how fast I could get a UART to go, apparently 128K baud…this is acceptable. What you do is you use a slave PIC16Fx (the F means flash btw) and I run a 5V zone next to my Beagle’s 3.3V one. The beauty of this approach is I’ve decided that I’m going to drive these motors DIRECTLY off of my Nickle-Metal Hydrides, no caps just spread my error over an inductive domain than a capacitive one (knowing look).
Can see my new buddy, Graham, wondering if he should whip out the old complex numbers on this assertion.
Can you do ESC direct from GPIO or PWM off of your Beagle? I suppose. And you might try it. Just pull directly off of a PWM line and feed it to the SSR at the front-end of what I’m talking about. I am not adverse to it other than the whole getting UN*X to do it. Maybe one of Lidia’s sitaras (I mock) and that PRU to do it. In fact, I would suspect, that that’s the whole point of the PRU issue.
So you get your PIC to accept on its hardware UART a byte of which motor speed you want to control (I need to control 8). Then I send it an int (2 bytes) with how long on it is, and then an int of how long off it is. And just implement it in a software loop completely bypassing the PIC’s hardware PWM as well. It just drives 8 GPIO’s leading to nice multi-stage ESC. We feed this nice PWM signal to the SSR’s which drive directly to MOSFET, and accept for the blowback rectifier, we are going to run this bare-metal as they put it (semiconduction aside).
“You can do it this way?” Its me, dear, I wouldn’t steer you wrong.
OK so let’s look at the power train. We have 1.2V NmH’s strung in series to give us about seven volts of beefy power (and we have the same number of cells as our motors) so I’m just going to say 2.5 Amp hours of juice (the rating of one cell). We use our stock BBBW to communicate with the PIC (that’s actually doing the speed control) via probably optoisolator-step-up, to custom programmed 5V PIC and then we just pull of its GPIO to cheap SSR direct to cheap MOSFET direct to beefy motor. I so know this will work. Somewhat improper I’ll admit, however life isn’t perfect. I can just tell this has the characteristics I likey.
I’ll put up a schematic, maybe even a PCB, of what I’m talking about here (tested) so you can use these little drone motors easily.
Theory: you’ll find these ones come in 2.2KV and 1.0 KV. I’m hoping my advisors have instructed me correctly that with the battery type I’m using, connection, propellers bought that it will transfer my battery power to nice upward force linearly and predictably. I got a grip of 1.0KV ones. the KV rating pertains to the RPM per volt. So a lower value would mean less RPM’s per volt, a higher higher RPM’s. From an engineering perspective what you want to do is look at the whole power subsystem seeing that you get a tight linkage between your power source and actual FORCE generated by the propellers. You can’t just say the 2.2KV ones are “better” or “more powerful” or you might end up with a system that’s electrically perfect but just doesn’t transfer power right.
Anyways…in conclusion…(UART to external MCU) to SSR to MOSFET direct to motor. Or PRU to SSR in previous description.
Ok, Here is the quick-and-dirty version:

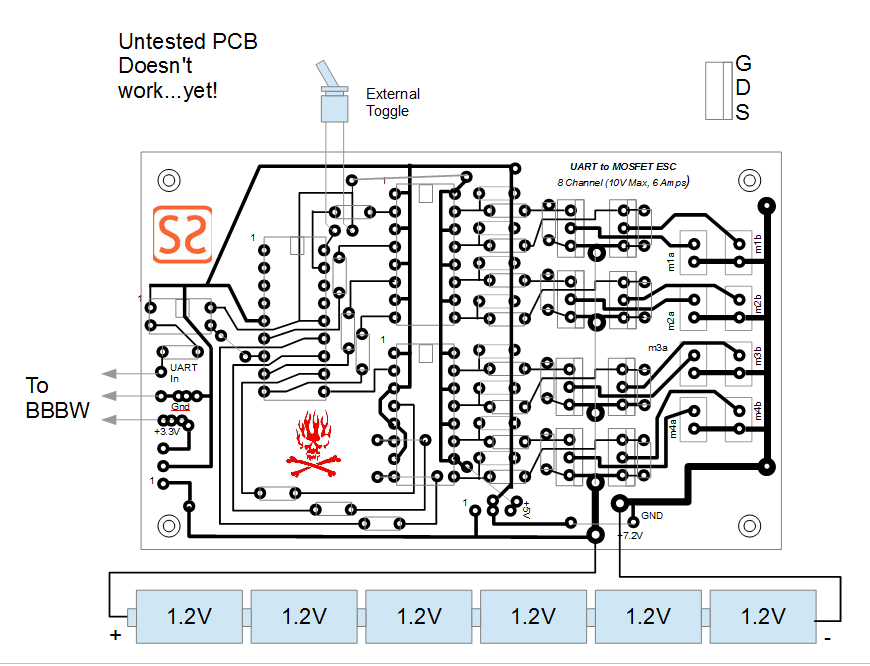
Now what’s interesting here I’ve conceptually combined two “angel” motors (counter-rotating) per “pod”, like an arm on a drone). Sorry about the doubling of the components but just trace a single PWM line to understand how all 8-channels work.
OK, values, sorry for not putting them on there. The resistor network on the far left side of the schematic is a standard voltage-divider for doing a low-cost…ok…I JUST MESSED UP (proving my point about getting schematics directly from the internet). There are a LOT of things wrong with this schematic. That;s why you breadboard first before doing anything real.
The voltage-divider is going the wrong way. What you need to do is a step-up optoisolator (or SSR which is just a bidirectional optoisolator on the output stage) to step up the 3.3V to the 5V necessary for that “zone”. Hang onto the voltage-divider discretes network through because you might want to pass your PIC’s TX back to the BBBW (move the voltage-divider down one pin (from pin 7 to pin 8) on the PIC to its UART TX and feed it to the BBB’s UART_RX) to pass any “status” information back (I think its overkill but oh well…you don’t need status from your external MCU…traces too short).
OK the resistor values on that discretes network can be found in my voltage-division post. I’m pretty sure about the values, but test, test, test.
OK, your “series” resistors can be obtained by our reference MOSFET design (which has a problem to, I think its blowbacks are backward backward, AND its battery is backward too…maybe). Its value is 100 ohms.
Your “bypass” resistors (between the source and gate on your MOSFETs) is 10K ohms. This is necessary to satisfy the local network requirements for your transistor usage, with it being a low enough resistance that we can trip the FET in switching mode yet high-resistance enough that small enough current that we aren’t paying anything for triggering.
I tried to integrate the reference design’s pot voltage-divider to ADC so we could have variable speed on test, but the particular PIC I’m using doesn’t have ADC, so I just wired a switch that will bring all channels up to 20% PWM. Just flick it (even without the BBB attached) to power up your motors to test. Just use a small toggle switch.
XTAL is 20 Mhz (unless the PIC I’m using is old-style, which I think is 4 Mhz). Try to get an MCU with 20 Mhz though, the faster the better. PWM should really be done at about a few 100 hz at least to iron out the power transfer. You do this in PIC firmware by counting the instruction cycles in your source code x your crystal speed).
And another concern that came up is you might need resistors on the PIC’s GPIO out to the LED’s on the optoisolators, like how you always use a certain resistor to a standard LED when using TTL (5VDC).
How do I power each of the zones. Figure it out holistically on current usage by component, but I’m sure you can just use 3.3VDC and 5VDC voltage regulators (the 7405 being typical for 5V) direct off of the 7.2 VDC zone. (You might want to soften out any spikes through with some mid-value caps though just to be on the safe side.)
What are the currents involved. This pertains to the gauge of wire you need to use for everything.
Typically you are looking at about 6 full amps on EACH of your motors (this is kind of high, but what people said…I’m thinking at 100% PWM duty cycle). So make sure your especially ground return on your native zone is wired with like extention cord. Also remember to discharge each of your NmH cells symmetrically with all the other cells. NmH is sensitive to memory effect (unlike LiPo or Li-ion which is much more forgiving) so try to drain them symmetrically and fully somehow.
Li-ion is something like 3.6 V…remember that your NmH’s are only 1.2 so you’ll have to use series to get their voltage up. 3 NmH (series connected) = 1 Li-ion cell on voltage. To calc amp-hours just add up the number of cells x their individual Amp-hours.
OK, here is my best guess. I’ll need to breadboard it out to get it working. It basically glues some reference designs (off of the Internet…beware lol) with some approaches that I’ve used for years together. I have to admit that I’m a little shaky in the MOSFET area, but I know I can get a design like this to work with some fiddling.
I would recommend to someone trying to get this to work to breadboard a SINGLE CHANNEL of it, maybe using the PWM on the BBB PRU to output signal to the optoisolator stage of the circuit. Or if you can find a solid pre-programmed PWM PIC out there (and there are quite a few smaller operators that sell ASIC-type preprogrammed PIC’s with some operation or function on them…for example, hobby servo control is a nice starter design to mess with) to drive your isolated power electronics with some kind of off-the-shelf motor.
*** Can you treat a propeller like a resistor? ***
An interesting idea I had was to treat my motor-propeller combination as a true electrical component, looking at it from a power transfer perspective. What I mean by this is there are equations out there that model perfectly a propeller’s force and a propeller’s effective power transfer to the air it pushes, that I suspect that you can equate the electrical equations involved with the mechanical POWER ones for propellers (and the electromechanical setup of the motors used to drive them). An idea. But it would allow you to fully model a drone’s power systems in a way I don’t think heretofore done.
OK here we talk about how to power the 3 voltage zones. You’ll notice that I’ve chosen holistically to do it with dumb voltage regulators and this is a product of kinesthetically “knowing” the current draw on each of the zones. The BBB is probably a little more of a power hog than people give it credit for, though I can feel the heat coming off it to be not much, so I’m sure it can be driven off of VR. The PIC the same…very energy efficient so a 7405 will keep my workload low. Also added are some pulldown resistors (on the “optional” network) because I’m afraid my MOSFET’s are going to “float” (they call it) and have the BBB to PIC issue worked out (you can float PIC lines because they have built in pulldown resistors).
Again, untested. I don’t use this term loosely. There is no guarantee that this circuit will even work at this stage.

OK, here is my best guess. I’ll need to breadboard it out to get it working. It basically glues some reference designs (off of the Internet…beware lol) with some approaches that I’ve used for years together. I have to admit that I’m a little shaky in the MOSFET area, but I know I can get a design like this to work with some fiddling.
I would recommend to someone trying to get this to work to breadboard a SINGLE CHANNEL of it, maybe using the PWM on the BBB PRU to output signal to the optoisolator stage of the circuit. Or if you can find a solid pre-programmed PWM PIC out there (and there are quite a few smaller operators that sell ASIC-type preprogrammed PIC’s with some operation or function on them…for example, hobby servo control is a nice starter design to mess with) to drive your isolated power electronics with some kind of off-the-shelf motor.
*** Can you treat a propeller like a resistor? ***
An interesting idea I had was to treat my motor-propeller combination as a true electrical component, looking at it from a power transfer perspective. What I mean by this is there are equations out there that model perfectly a propeller’s force and a propeller’s effective power transfer to the air it pushes, that I suspect that you can equate the electrical equations involved with the mechanical POWER ones for propellers (and the electromechanical setup of the motors used to drive them). An idea. But it would allow you to fully model a drone’s power systems in a way I don’t think heretofore done.
OK here we talk about how to power the 3 voltage zones. You’ll notice that I’ve chosen holistically to do it with dumb voltage regulators and this is a product of kinesthetically “knowing” the current draw on each of the zones. The BBB is probably a little more of a power hog than people give it credit for, though I can feel the heat coming off it to be not much, so I’m sure it can be driven off of VR. The PIC the same…very energy efficient so a 7405 will keep my workload low. Also added are some pulldown resistors (on the “optional” network) because I’m afraid my MOSFET’s are going to “float” (they call it) and have the BBB to PIC issue worked out (you can float PIC lines because they have built in pulldown resistors).
Again, untested. I don’t use this term loosely. There is no guarantee that this circuit will even work at this stage.
Well, it won’t work because the diode of the optocoupler is connected incorrectly.
Regards,
John
Check it. Doesn’t work though. My dyslexia apparently. However this is what it will look like when finished. About 7" x 5". Machine screw it to the basswood or laminate baseboard on the drone and this is the complete BBB controllable power stage.
Managed to dig up the blue prints for the physical drone. Nice boilerplate design using 0.5 wooden dowel coupled with “geodesic” joins with wire to hold it in tension. I CA the GPS chip antenna near the center, but I need the MCU6050 inertial right at the center of gravity so I might put it on wire and even epoxy it right to the drone’s center of gravity. My Emerson cam just mounts on a single hole driller through the baseboard and is its own independent subsystem (though it could be integrated later with the USB on my BBW).
I just got the motors in today…significantly smaller than what I visualized in my head. I’ll report on this later. Luckily we have 8 of them.

OK (laughing my ass off)
Came up with some super-cool ideas for this:
Full citywide 4/5G TCP/IP stack communication by 4/5G USB module (with capacity to take and transmit JPEG stills of an area, usually just pushes numeric data to keep it within plan)
Urban Surveilance and Pasification Unit. (a USPU…just made it up…lol jk) Just mount a police-strength white LED flashlight on the underside of it and turn it on and off via PIC-driven relay and power it directly off your Li-ions.
Fly you “colors” on the underside of it “militia-style” so they know what “faction” it is.

My choice for what “colors” I would fly on the underside.
I’m joking around on most of this, but it does make you think.
Ok here is what I have so far. I’m almost finished with the geodesic (I still want to “solvent weld” the joints though). Need to swap out the wire with picture-hanging wire and get the basswood “base board” to mount my electronics on. I’m going to do the motor mounts as aluminum plates that I’m going to Drexel fabricate. Looks like I’m going to have to go with the mast approach to get my mentioning right though it will make moving my boards around difficult.
