Hello,
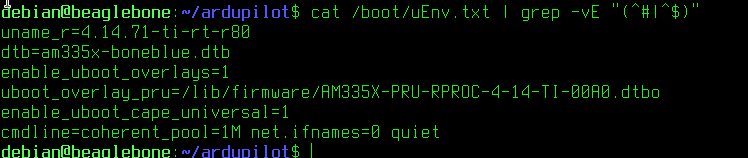
Has anyone successfully got their BBBlue to work w/ librobotcontrol and the PX4 software?
Seth
P.S. Is this normal? This is from the source of px4 before compilation plus it does not compile into the px4 source when cross-compiling. Also, upload to the BBBlue from a dev. desktop does not fully support the BBBlue. So, there will be some advancements in this field before I finish.
/* PRU encoder input */
0x038 0x36 /* P8_16,PRU0_r31_16,MODE6 */
/* PRU Servo output */
0x0e0 0x05 /*pru1_pru_r30_8, MODE5*/
0x0e8 0x05 /*pru1_pru_r30_10, MODE5 */
0x0e4 0x05 /*pr1_pru1_pru_r30_9, MODE5 */
0x0ec 0x05 /*pru1_pru_r30_11, MODE5 */
0x0b8 0x05 /*pru1_pru_r30_6, MODE5 */
0x0bc 0x05 /*pru1_pru_r30_7, MODE5 */
0x0b0 0x05 /*pru1_pru_r30_4, MODE5 */
0x0b4 0x05 /*pru1_pru_r30_5, MODE5 */
0x0C8 0x0F /*P8.36, SERVO_PWR GPIO OUT*/
and…this is from the BeagleBoard-DeviceTrees github.com repo.
&am33xx_pinmux {
/***************************************************************************
* Static Pinmux
***************************************************************************/
mux_helper_pins: pins {
pinctrl-single,pins = <
/* GPIO Inputs */
0x09c 0x37 /*P8.9 Pause BUTTON, input pullup*/
0x098 0x37 /*P8.10 MODE BUTTON input pullup*/
0x1AC 0x37 /*P9.25 MPU-9150 INTERRUPT IN*/
/* Motor Control GPIO Out*/
0x088 ( PIN_OUTPUT | MUX_MODE7 ) /* (T13) gpmc_csn3.gpio2[0] - MDIR_1A different from cape! */
0x074 ( PIN_OUTPUT | MUX_MODE7 ) /* (U17) gpmc_wpn.gpio0[31] - P9.13, MDIR_1B */
0x040 ( PIN_OUTPUT | MUX_MODE7 ) /* (R13) gpmc_a0.gpio1[16] - P9.15, MDIR_2A */
0x0D8 ( PIN_OUTPUT | MUX_MODE7 ) /* (V4) lcd_data14.gpio0[10] - P8.31, MDIR_2B different from cape! */
0x0AC ( PIN_OUTPUT | MUX_MODE7 ) /* (R4) lcd_data3.gpio2[9] - P8.44, MDIR_3A */
0x0A8 ( PIN_OUTPUT | MUX_MODE7 ) /* (R3) lcd_data2.gpio2[8] - P8.43, MDIR_3B */
0x0A0 ( PIN_OUTPUT | MUX_MODE7 ) /* (R1) lcd_data0.gpio2[6] - P8.45, MDIR_4A */
0x0A4 ( PIN_OUTPUT | MUX_MODE7 ) /* (R2) lcd_data1.gpio2[7] - P8.46, MDIR_4B */
0x1B4 ( PIN_OUTPUT | MUX_MODE7 ) /* (D14) xdma_event_intr1.gpio0[20] - P9.41, MOT_STBY */
/* PRU encoder input */
0x038 0x36 /* P8_16,PRU0_r31_16,MODE6 */
/* PRU Servo output */
0x0e0 0x05 /*pru1_pru_r30_8, MODE5*/
0x0e8 0x05 /*pru1_pru_r30_10, MODE5 */
0x0e4 0x05 /*pr1_pru1_pru_r30_9, MODE5 */
0x0ec 0x05 /*pru1_pru_r30_11, MODE5 */
0x0b8 0x05 /*pru1_pru_r30_6, MODE5 */
0x0bc 0x05 /*pru1_pru_r30_7, MODE5 */
0x0b0 0x05 /*pru1_pru_r30_4, MODE5 */
0x0b4 0x05 /*pru1_pru_r30_5, MODE5 */
0x0C8 0x0F /*P8.36, SERVO_PWR GPIO OUT*/
I thought SERVO_PWR GPIO OUT was gpio80. Also…I see the encode input is P8_16 on this .dts file. I thought it was P8_15 for the PRU input pin on the encoder4 connector?