The documentation states that the AM67 processors support up to 4 Controller Area Network (CAN) buses. However, I was not able to find any information for CAN on the BeagleY-AI.
Does the BeagleY-AI support the CAN features of the AM67 processor?
Thanks for your response.
Can you please tell me which CSI connector?
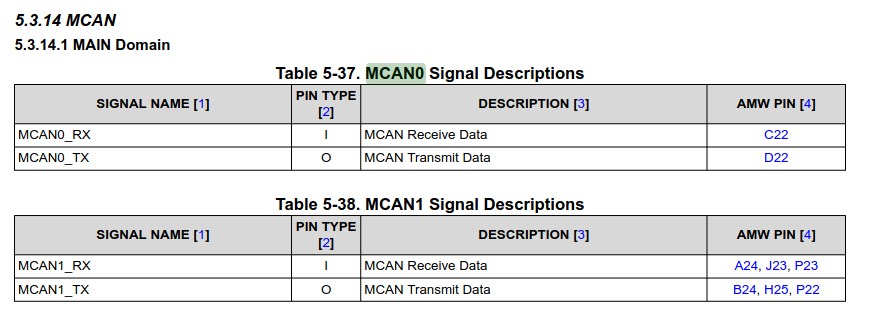
For CAN support, at least two pins would be needed.
Which two pins are available?
Thanks
Near the bottom of the page under ‘miscellaneous’, the drawings for General IO and MCU General IO have connections for MCAN0, MCU_MCAN0 and MCU_MCAN1. You’d need to follow the connections to see which connector thay go to.
They will be multiplexed with other signals so I guess they would need a device tree mod to enable them.
I have created one and received the boards from SEEED. I haven’t had time to test it but since I retired last week I should be able to put get it tested before new year. If I get the board working you could buy it from me, I will publish the information on my SuzieLinux web site.
It is surface mount which I will solder the parts with my reflow oven. I also plan to make a box using my 3D printer.
You have created one of what?
Did you create an adaptor board, which breaks out the CAN lines from the CSI connector of the BeagleY-AI board? If you did, I’d be interested to see the board.
Will you be testing the device tree files and the drivers as well?
Yes, I’m aware of these modules (MCP2515), which can be programmed through SPI.
Are BeagleY-AI drivers available for the MCP2515?
(I’m guessing Raspberry PI drivers and code are available.)
Nevertheless, it would be a shame not to be able to use the embedded CAN controller in the AM67A. CAN transceivers are usually less expensive than full CAN controllers, which include transceivers, like the MCP2515.
I was looking for possible CAN solution for BeagleY-AI some time ago. There is a driver for this chip in the Arago Linux shipped with TI PSDK 10: mcp251xfd.ko. But I decided to go another way: currently I use a microcontroller for all peripherals. I agree, they could find place on the board for two CAN connectors and transceiver ICs, like it is done on TI SK boards.
Sending response with thunderbird has issues, the forum doesn’t know how to use the Linux line change. Must be windows only junk …
So I am fixing it with the edit mode.
I did that board several months ago, as I was about to retire I was overworked and didn’t have time to test the board. My board connects to the CSI ports, I brought out 3 CAN ports.
If there are issues I will have to rework the board.
I created the board with Kicad 8 on Arch Linux.
This week I have been working on a couple boards that use RL78 F14 to test making boards with QFN devices. I have a board with F14 48 pins and one with a F14 32 pins. RL78 looks like a 16 bit Z80.
The F14 is similar to the G14 except that it has an on board CAN and LIN port. Hopefully I didn’t goof on the beaglebone board, that was a quick design, as I was ordering a few RL78 boards I added it to them.
I did test the adapter I had for the beaglebone AI-64 where I have 5 CAN ports, fully tested with socket can.
When I get the boards working I will document them on my website and offer to sell it to people who don’t want to spend the time making their own.
I am using Debian on those beagle boards.
I will put a picture of the schematic on my website after I check for errors. Details come once I have the board tested.
Device tree is no big deal, embedded linux was part of my work in the job I just retired from. In the past I have used Gentoo and Funtoo on my arm board boards (beagle board, allwinner and Odroid).
I do plan to use gentoo or arch linux on that board once I get the CAN board working with Debian. With the RL78 boards I
have a connector to be able to use a 3.5 inch LCD that is meant to use with an arduino board. I use a CH340G to connect the UART to USB.
That would be another way for someone to have CAN with a beagleboard if you think that using the CSI port is a problem.
The RL78 F14 48 pin device board has two CAN, the onboard can and a MCP2718FD that connects to a SPI port. I intend to have full support for it on linux and free BSD with the proper kernel modules.
As I am no longer tied with a non compete contract I can do stuff for fun and maybe make money with it.
I have some working boards with 32 pins G14 with one MCP1718FD and serial to USB. I will do the Linux support for the G14 boards before I do the F14. Those last are newer designed I have done this week.
The other ones I had created them during the pandemic to help be out with my work as my employer was pushing and I couldn’t get evaluation boards.
I created my own evaluation boards. Now you can get those boards for around $25 but there are no CAN ports on them. I will test those with Arch Linux, Debian and Gentoo. I removed funtoo since it is being discontinued. Right now my website just has some old gentoo installation for a beagleboard, I will modify to have misc projects with Kicad. I have worked in the automotive and military industry since 1983. I did a design of a voice recognition for GM and one for pinch protection for Ford Taurus sunroofs.
There was something funny a few years ago as a lawyer offered to pay me $200 an hour for testifying against my previous employer as they were involved in a lawsuit about touch screen.
Some invention I did years ago and my previous employer never bothered to put my name on the patent. I was wondering how they knew that it was me who invented it. They did settle out of court.
I did work a few years on something else.
I did the mail system for Merryl Lynch at the world trade center.
I designed a remote microscope control for a medical electronic company.
I designed a light control system for the Montréal Hockey forum, Montréal casino and Toronto Skydome.
I have a eagle licence but I don’t use it since they moved to their subcription crap. I have switched to Kicad. I use Kicad 8 on arch linux.
I do some drawings on my mac studio, I haven’t update it to version 8 yet. I do plan to publish as open source.
I don’t want to do that until I have the board working I don’t want to look like a fool if it doesn’t work.
People could buy the board from me if they want, populated or not I will also provide a file for the box. I use a FlashForge 3D printer to do my boxes. On my board I have 2 DB9, one has connections for two CAN (same connections that Intrepics uses), the other one is one CAN.
The drivers I use are SN65HVD230 SMD.
I only saw 3 CAN coming out.
On my board I use a smaller connector as I use a RPI 22 pins to 15 pins adapter
In my job before I retired I used that device with the Yamaha display and there were quite a bit of issues. Very few filters. You would be better off with the MCP2518FD if using one on a SPI. I use it on my RL78 boards and it works nicely. All the Beagleboard boards except this one do have direct access on the connectors.
On the Beaglebone AI-64 I have 5 working CAN populated.
If you feel uncomfortable about using the CSI board you could always try my RL78 boards. SInce all they would need to do is CAN access that should be efficient. The speed of the uart can be higher than the CAN speed. Most external CAN boards work that way, whether they are Vector, ACTIA IME or Intrepidcs.
As for the interface to this one it looks like my board is done correctly. So far my issue was to create the stencil. For some reason the send to Silhouette no longer works correctly with Inskcape either on Arch Linux or Debian. I haven’t tried on gentoo as I assumed that the issue was likely in inkscape.
My solution was to buy the licence for the Sihouette Industrial software which supports SVG files that I create with Kicad. It costs $79 for the one I bought for my Mac Studio.
I will put more details on my website once I get the board working
I haven’t update my website in a few years
I found out that the convertion cable I was planning to use is wrong. I have revised the board and will reorder once I received the connectors I ordered from aliexpress. I want to make sure I situate it correctly as I don’t know if the connectors I will receive have the pins on the bottom or the top.
The first board I will publish on my website will be one with a RL78/G14. I am writing support so it can be used with the serial as with CAN232. I am looking at a better solution to add support for CANFD. CAN232 doesn’t support CANFD.
I will test it with my PC, RPI and this board.
It will likely take me a few weeks as I also have to add LCD support and it is my first design using e2studio instead of IAR. I’ve used IAR for the past +30 years but I am now retired and don’t want to spend $5k for IAR. I hate eclipse but it is free.
I am not familiar with either one, I will have to check.
I just put my schematic of the CAN adapter on my website.
As I mentionned on the website I expect boards early february if I get the connectors soon.
I am not sure if the connectors I bought have pins on top or bottom so to get the right pinout I have to see for myself.
Since I don’t trust any of those cable adapters I chose to have a straight to cable with a similar connector. I added an EEPROM to my new board.
If the connectors come late this could delay until after the Spring Festival. That holiday is a big thing in China and seeed is usually close for the duration of the holiday.
Using FFCs or FPCs to establish a physical CAN interface is quite uncomfortable. Unfortunately the AI-Y doesn‘t give any other choice. Would have been better beagleboard to not copy 100% the RPi5 header pinout.
A work around would be to do as I do with my RPI and RL78 boards is to use a MCP2518FD device. I have one of those adapter boards in the works for the AI-Y board and RPI 400. I am adding an EEPROM so it can be identified as with the beaglebone boards. It will be open source as my other boards. I have a github account so I would put it there. My website at netonecom.net doesn’t support git. My old buddy is retired and the new owner is not interested in adding support for git or svn.
I will order it at the same time as I order the other one to save money on shipping. On those boards I use a MCP2562FD driver. That driver is usefull if you want to run the CAN at 4M or more.
If you don’t need CANFD a MCP2515 would do. I have several boards with it I used on RPI zero a few years ago. I was using it with a Funtoo Linux. Funtoo no longer exists so I am moving to Gentoo on my RPI and Odroid boards. On YouYeeToo I use archlinux.
I haven’t checked the pinout difference to see if they would work on this board.
It would connect to one of the SPI port. Any suggestion as to which port you would prefer before I order the board?
Check on my website. I have just received an adapter and straight cable. I was uncomfortable about the soldering of the small connector so I also got an adapter that converts to a thru hole connector. So if I have issues soldering the connector I have an alternative. I got these from Aliexpress but you can find them on amazon also, much more expensive though.
I guess you have no other choice than using the adapters. Manual soldering 0.5mm pitch is almost impossible unless you want to use solder paste etc.
I am using the FFC adapters to connect customized OLDI display and CSI cam to my AI-Y.